我们正在向新域名迁移,3秒后自动跳转
We are migrating to new domain, will redirect in 3 seconds
jackwish.net -----> zhenhuaw.me
笔记:Machine Learning by Andrew Ng
所有内容来自 http://ml-class.org 。最后一部分尚未完成。
线性回归
元线性回归中的多个输入变量 \(x_i\) 的取值域可能差异较大,比如一个是 \(\begin{bmatrix} 0.01 & 0.1 \end{bmatrix}\),而另一个是 \(\begin{bmatrix} 100 & 10000 \end{bmatrix}\) 。这带来的问题是,多维空间中的损耗函数在各个方向上的梯度分布不均匀,甚至差异极大。那么,当采用梯度下降来优化参数时,可能会在某个方向上浪费过多的资源,导致收敛速度较慢。
该问题一般使用特征缩放(Feature Scaling)和均值归一(Mean Normalization)解决。特征缩放将各个输入处于这些输入的阈值,均值归一将各个输入减去所有输入的均值。结合起来得到
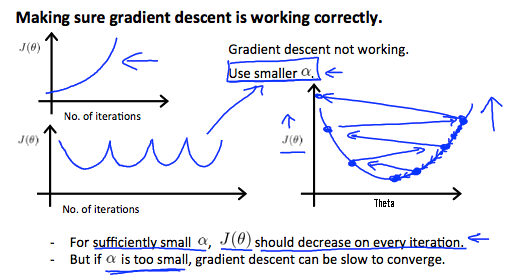
\[x_i' = \frac{x_i - u_i}{x_{\mathrm{max}} - x_{\mathrm{min}}}.\]不当的学习速率可能会影响模型的收敛。当学习速率过大时,训练的准确性可能会一直增长,或是持续地抖动。这是因为,在采用梯度下降优化时,过大的学习速率使得我们「不断」地跨过了「山谷」。由于在「山坡」上的梯度更高,使得下次迈向更高的「山坡」,如下图。学习速率过低会导致收敛太慢。经验性的学习速率为 0.01 或更低,调整的幅度为 3X。
梯度下降优化方法需要缓慢地逼近局部最小值,而正规方程可以直接找到极小值,省去大量的迭代计算。对于线性回归问题 \(\textbf{Xθ} = \textbf{y}\) ,有正规方程(Normal Equation)\(\textbf{θ}=(\textbf{X}^\mathrm{T}\textbf{X})^{−1}\textbf{X}^\mathrm{T}\textbf{y}\) 。然而,当参数数量比较大时(比如有 10000 个),正规方程的求解复杂度 \(O(n^3)\) 是不可接受的(主要是求矩阵逆开销太大),这时要用梯度下降。
逻辑回归
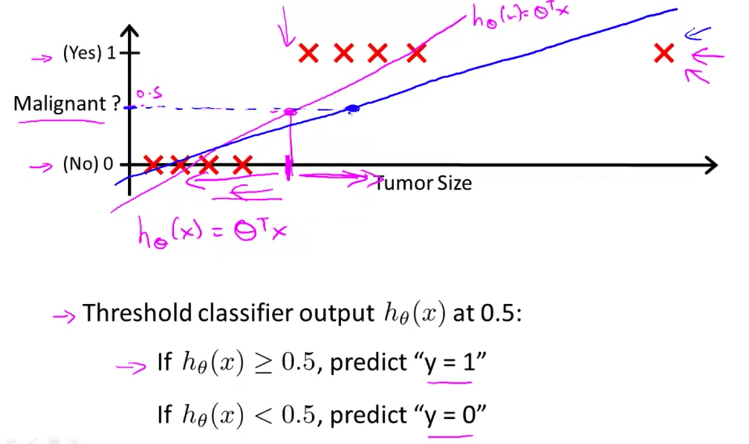
对于分类(classification)问题而言,应用线性回归是有问题的。分类问题可以抽象成输出为 0 和 1 ,而线性回归的预测结果一般会有 >1 或 <0 ;并且,线性回归对额外数据敏感,不能很好地拟合分类问题(如下图)。此时,我们需要用 sigmod/logistic 函数来拟合。
逻辑回归描述的是对于给定的 \(\bf{x}\) ,\(\bf{\theta}\) 将输出 \(y\) 参数化为 1 的概率—— \(P(y=1 \vert \textbf{x};\bf{\theta})\) 。
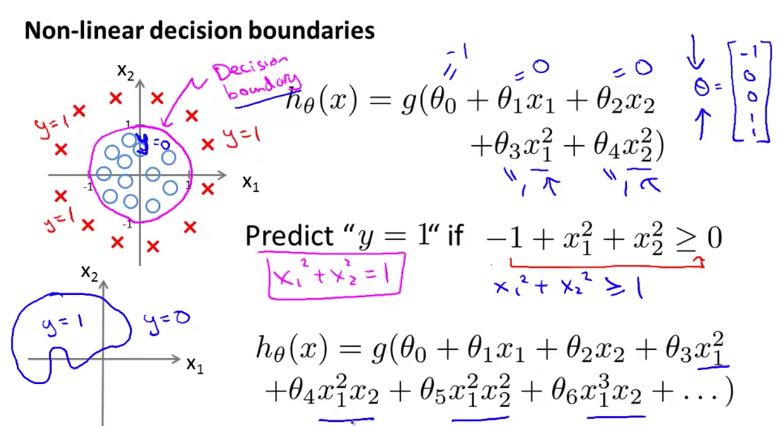
\[h_\theta(\textbf{x})=g(\theta^\mathrm{T}\textbf{x})\] \[g(z)=\frac{1}{1+e^{-z}}\]决策边界(decision boundary)是二分类的「分界线」。它并不总是线性的,如下图。
如果我们将上文中应用于线性回归的 \(L^2\) 误差函数,应用于逻辑回归这样的分类问题,那么我们的误差函数可能是无法收敛的(因为有太多的局部最小值)。
适合于逻辑回归的损耗函数定义为:
\[J(\theta) = \dfrac{1}{m} \sum_{i=1}^m \mathrm{Cost}(h_\theta(x^{(i)}),y^{(i)})\] \[\begin{align} \mathrm{Cost}(h_\theta(x),y) &= \left\{\begin{array} -\log(h_\theta(x)); & \text{if y = 1} \\\\ -\log(1-h_\theta(x)); & \text{if y = 0} \end{array}\right. \\\\ &= y^{(i)}\log (h_\theta (x^{(i)})) + (1 - y^{(i)})\log (1 - h_\theta(x^{(i)})) \end{align}\]在通过最小化 \(J(\theta)\) 求解 \(\theta\) 时,除了梯度下降外还有很多更加高效的算法:Conjugate dradient, BFGS, L-BFGS。但它们过于复杂,我们一般直接使用相关的库函数,如 Octave 中的 fminunc 。
对于多元分类问题,我们可以将其转化为若干个二分类问题,并分别训练。在推理时,选择「信心」最足的那个二分类作为结果。
神经网络
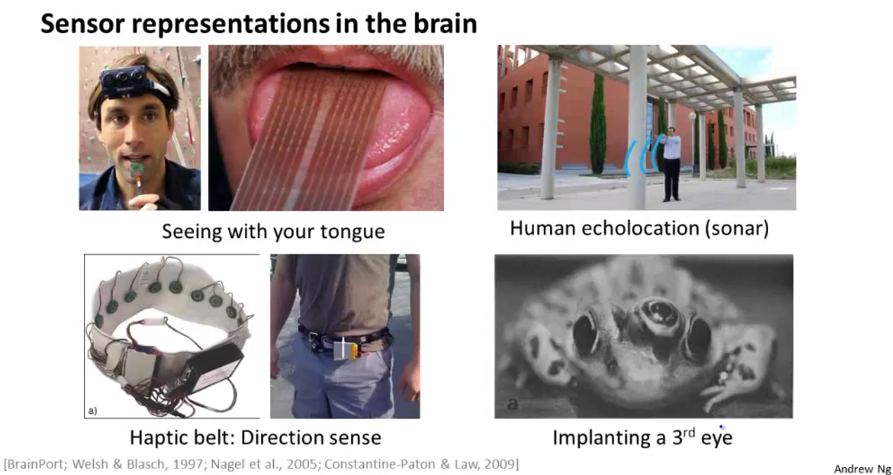
当将线性回归或逻辑回归应用于复杂问题时,我们需要的参数数量几乎相对于特征数量成 \(O(n^2)\) 增长。另一方面,人们发现大脑具有极高的灵活性(原本处理听觉的区域在连接视觉神经后可以处理视觉),乃至出现下图中的一些实验性应用。
神经网络的一个示例如下图,其中的激活函数为 logistic/sigmod 函数。可以看到,每个神经元和它的前驱节点之间的关系是非常结构化的,数学描述也非常一致。类似于线性回归,我们通常会增加一个输入 \(x_0\)(在第 \(i\) 层中是 \(a_0^{(i)}\))作为偏置(bias)。其中的 \(\Theta_{ij}^k\) 是从 k-1 层中第 j 个神经元到第 k 层中第 i 个神经元的链接的权重/参数。
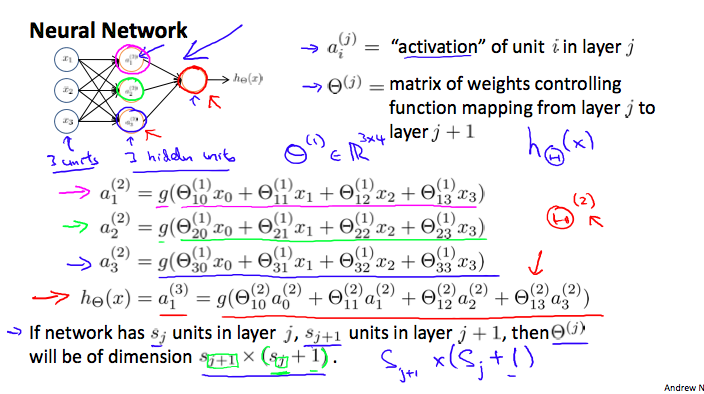
对于上图中的网络,我们可以引入 \(\textbf{z}^{(j)} = \Theta^{(j-1)}\textbf{a}^{(j-1)}\),其中 \(j\) 表示网络中的层数。那么有 \(\textbf{a}^{(j)} = g(\textbf{z}^{(j)})\),和最终的输出 \(\textbf{h}_\Theta(\textbf{x}) = \textbf{a}^{(j+1)} = g(\textbf{z}^{(j+1)})\) 。针对网络中的每个神经元,我们都可以将其看做是一个简单的逻辑回归问题;那么神经网络本身就是由若干个逻辑回归分类器链接而成。
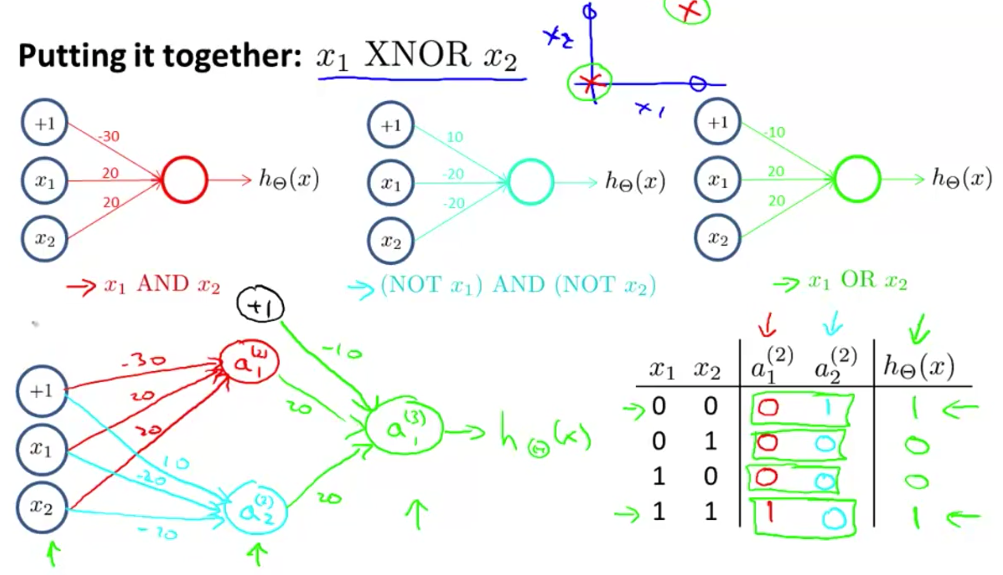
神经网络最初的特别之处在于它能学习 XOR ,一个这样的网络而具体实现如下图。可以看到,神经网络可以将一些相对较为简单的函数组合起来,形成强大的表达能力。
神经网络的误差函数为:
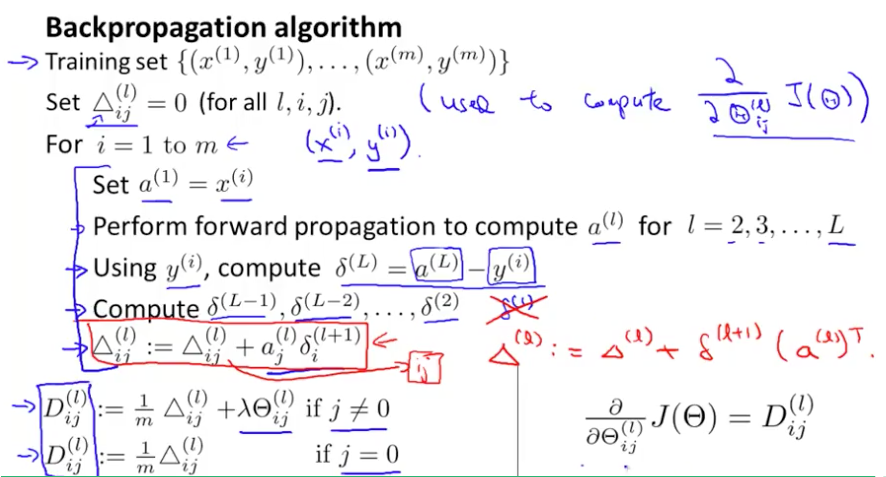
\[\begin{gather*} J(\Theta) = - \frac{1}{m} \sum_{i=1}^m \sum_{k=1}^K \left[y^{(i)}_k \log ((h_\Theta (x^{(i)}))_k) + (1 - y^{(i)}_k)\log (1 - (h_\Theta(x^{(i)}))_k)\right] + \frac{\lambda}{2m}\sum_{l=1}^{L-1} \sum_{i=1}^{s_l} \sum_{j=1}^{s_{l+1}} ( \Theta_{j,i}^{(l)})^2\end{gather*}\]反向传播是神经网络中比较流行的计算误差梯度的方法,其具体(一种易于计算的方法)计算步骤如下图。
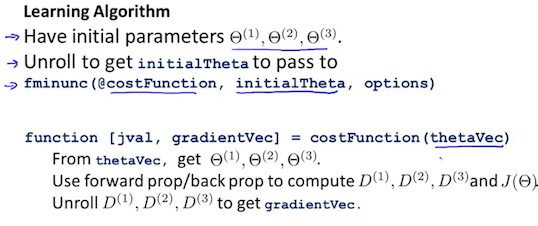
在反向传播的计算实践中,我们可能会将参数矩阵 \(\Theta\) 展开成向量(因为 fminunc 这样的函数要求参数为向量?)。具体的方法如下。
可以看到,反向传播算法的计算还是比较复杂的,那么我们在实践中就很容易出错。通常我们可以「手动」计算梯度(计算方式如下)来检查通过误差函数得到的梯度是否正确(两者接近或相等)。不过,这种计算比较费时,在正式训练时要记得关掉。
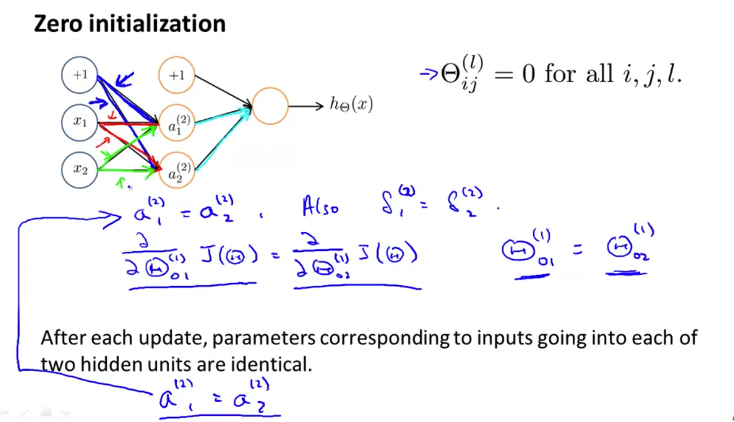
\[\dfrac{\partial}{\partial\Theta_j}J(\Theta) \approx \dfrac{J(\Theta_1, \dots, \Theta_j + \epsilon, \dots, \Theta_n) - J(\Theta_1, \dots, \Theta_j - \epsilon, \dots, \Theta_n)}{2\epsilon}\]训练中的另一个需要注意的问题是要随机地初始化参数。考虑所有节点(也可以是部分)的参数都是一样的,如下图中相同颜色的链接。那么学习时,他们得到的更新也是一样的。这样的情况称作「对称性」,它使得网络中实际起作用的节点数变少了。随机地初始化参数可以解决这一问题。
关于机器学习应用的建议
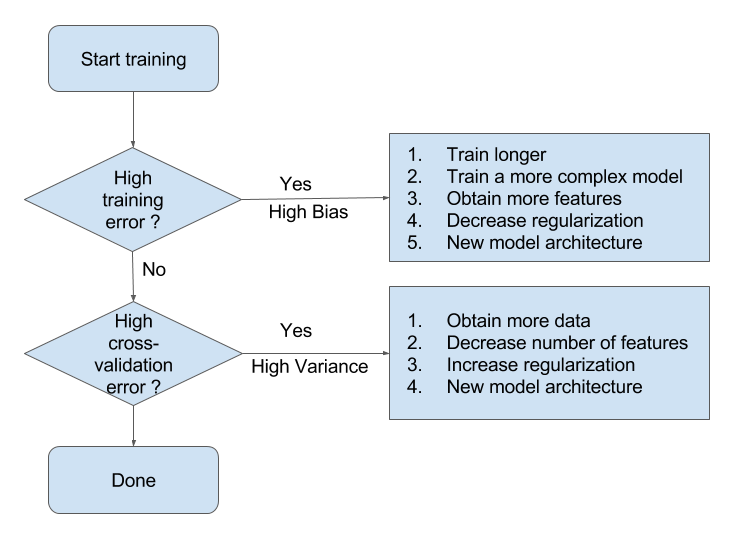
当我们在预测中发现错误率过高时,应当考虑改进我们的算法。改进的几种基本方法包括:获取更多的训练数据、减少/增加特征、增加多项式特征(即 \(x_1^2, x_2^2, x_1x_2, ...\))、调整正则化参数 \(\lambda\) 等。具体选择哪一种要结合实际情况。
正规化
当过拟合发生时,我们一般裁剪特征数量(手动或自动),或是采用正规化(Regularization)。正规化「压缩」特征,使得拟合不会被个别特征过度影响,如下图。
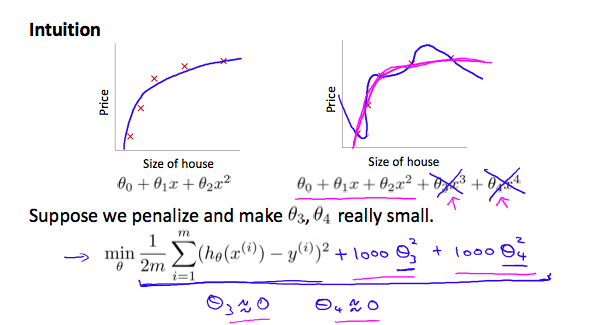
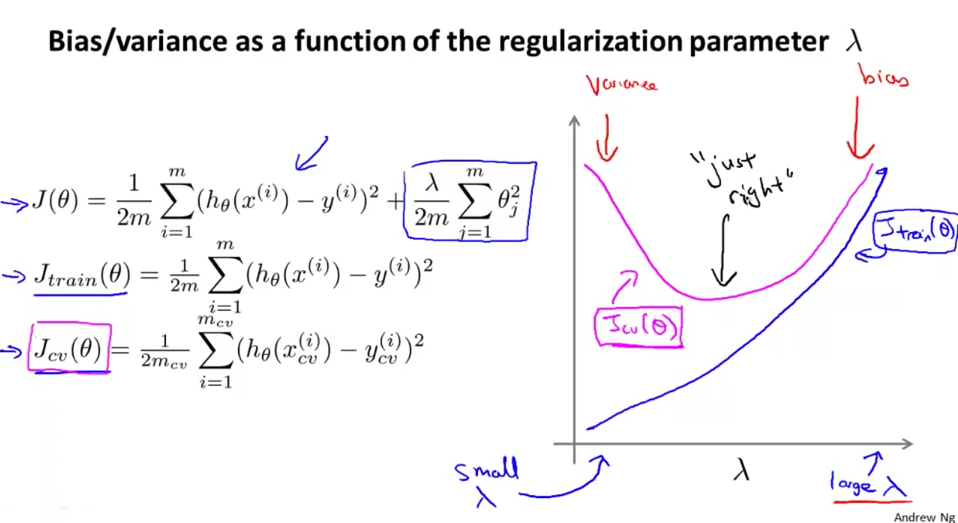
上面的公式是正规化的数学表示,其中 \(\lambda\) 是用于调整正规化程度「正规化参数」(regularization parameter)。该参数不能过大,否则 \(\theta\) 会趋近于 0 (假说失去表达能力),从而发生欠拟合。一般以「两倍」的速度来调整 \(\lambda\) 。当 \(\lambda\) 变换时,训练集和验证集的损失函数变换如下图。
对于线性回归,用梯度下降求解 \(\theta\) 时,在每次迭代中, \(\theta\) 的「原始值」都比没有正规化要保留得少,那么直觉上最终的 \(\theta\) 也会比较小。当用正规方程求解时(\(\theta = \left( X^TX + \lambda \cdot L \right)^{-1} X^Ty\),其中 \(L = \begin{bmatrix} 0 & & & & \newline & 1 & & & \newline & & & \ddots & \newline & & & & 1 \newline\end{bmatrix}\)),其中的逆矩阵部分会必然可逆,这是正规化的另一个好处。逻辑回归中的梯度下降具有类似性质。注意,我们不对 \(\theta_0\) 使用正规化(尽管这对最后的拟合影响不大)。
模型容量与错误率
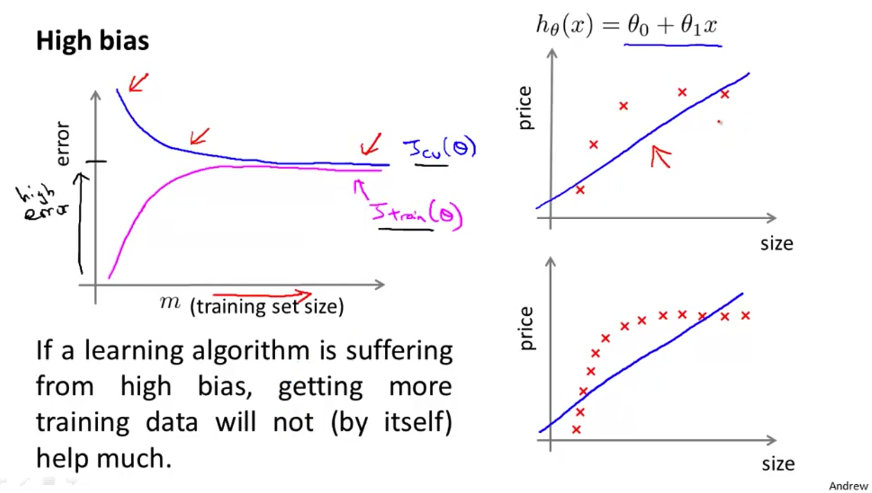
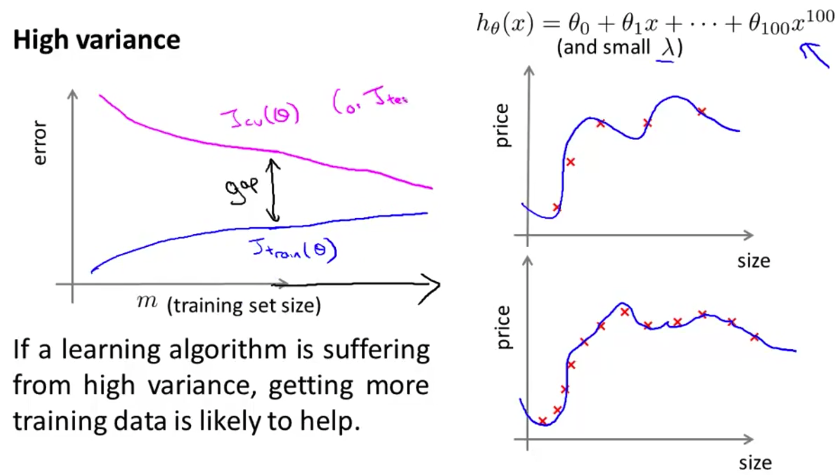
下面继续看模型容量和训练样本以及误差率的关系。当模型容量较低(即欠拟合)时,训练集和验证集上的错误率都比较高。而且,由于模型容量低,少量的数据便使得模型达到拟合极限,错误率几乎不再变化。这时收集更多的样本意义不大。
当模型容量过高时容易发生过拟合,此时训练集误差和测试集差距较大。随着数据量的不断增长,模型的预测会逐步改进,以至于最后可能得到很好的结果。不过这付出的代价可能不太值得。
机器学习系统的设计
当面对一个新的机器学习问题时,往往可以「三步走」:
- 用最熟悉和最简单的算法做一个快速实现,并做交叉验证。
- 画出学习曲线,看看增加特征或样本等是否有帮助。
- 分析验证集中被错误分类的样本,确定下一步优化的方向。
结合上一小节的分析,我们可以有如下的设计流程。
精确度和召回率
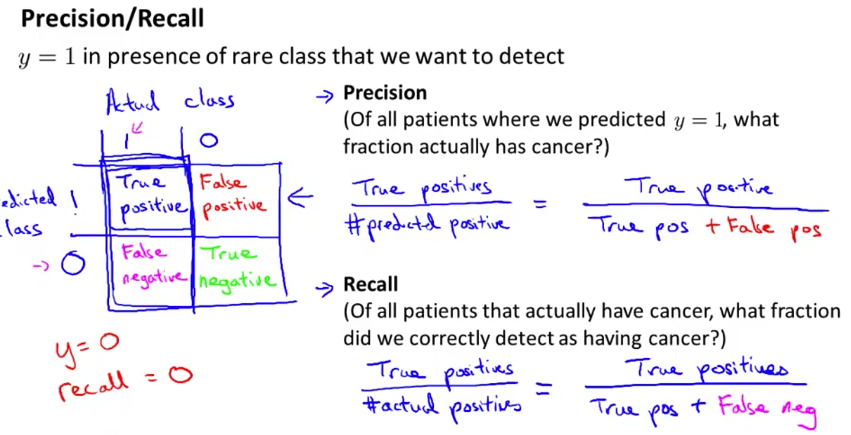
有时准确度(accuracy)并不能全面地衡量一个算法的好坏。例如有二分类问题 \(P(y=1 \vert x) = 0.95\) ,那么一个永远只返回 \(\hat{f}(x) = 1\) 「欺骗性」模型拥有的准确度有 95% 之高。这时我们就需要引入精确度(precision)和召回率(recall)来进一步评价模型的好坏。
对于二分类问题,准确度(accuracy)是指预测结果和标记一致的比例。精确度(precision)是指在预测为「真」的结果中,预测正确的比例。召回率(recall)是指在真正是「真」的结果中,我们预测正确的比例。例解如下图。
精确度和召回率的问题在于,我们无法同时提高两者,这便出现了权衡。这种权衡要针对特定的问题场景来决策,即取决于我们的算法想要达成的目标,以及我们对结果的偏好程度。例如,当我们预测癌症时,一方面是「假阳性」预测会让患者心里受到巨大冲击,另一方面「假阴性」可能使得患者错失治疗时机。
在机器学习领域,一种评价精确度和召回率的方法为:\(F=\dfrac{(a^2+1)P \cdot R}{a^2(P+R)}\) ,其中 \(P\) 和 \(R\) 分别是精确度和召回率。当 \(a=1\) 时为:\(F=2\dfrac{P \cdot R}{P+R}\)。(评价方法有很多,这只是其中一种。)
另外,单纯地增加样本数量并不总是能改进预测结果。如果样本中特征的数量太少,以至于人类专家也无法依据这些有限的特征来预测结果时,增加样本数量的好处可能比较微弱。这时我们需要改进模型。
支持向量机
支持向量机(Support Vector Machine)这个名字太不直观了,要再找点其他资料。
大边界分类(无「核」)
虽然逻辑回归能有效地做二分类,但它存在一个问题——对输入比较敏感。具体而言,当逻辑回归学习到一个决策边界时,该边界实际上存在的可能性很多(很多边界都可以分类样本,这在样本数较少时尤为突出)。
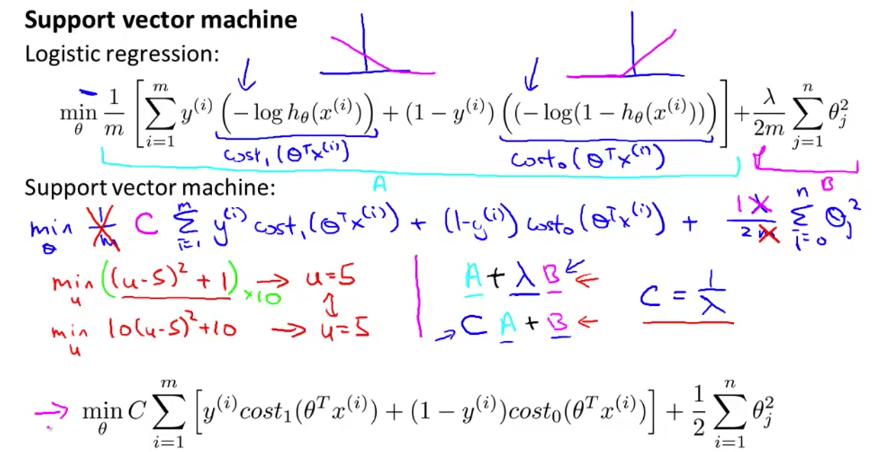
支持向量机改进了逻辑回归的损耗函数(如下图),使得最终学得的边界与两类样本的距离都较大。即,它学到了「某种意义上的」最优分类方法。当然,这种学得的结果对样本的敏感程度由损耗函数中的 \(C\) (相当于正规化参数 \(\dfrac{1}{\lambda}\))控制。注意下图中 的 \(\mathrm{cost}_1(z)\) 和 \(\mathrm{cost}_2(z)\)。
但是,为什么支持向量机能学习出大边界呢?
我们知道,向量内积(inner product) \(a{\cdot}b\) 的结果是 \(a\) 在 \(b\) 的方向上的投影长度和 \(b\) 的长度的乘积。而在支持向量机的损耗函数中,我们有针对 \(\theta^{\mathrm{T}}x^{(i)}\) 的判别。将 \(\theta^{\mathrm{T}}x^{(i)}\) 转化为 \(p^{(i)}\cdot \Vert \theta \Vert\) (其中 \(p^{(i)}\) 是 \(x^{(i)}\) 在 \(\theta\) 方向上的投影),我们得到下图中的损耗函数(”s.t.” 的第二部分中 的 if 应为 \(y^{(i)}=0\))。
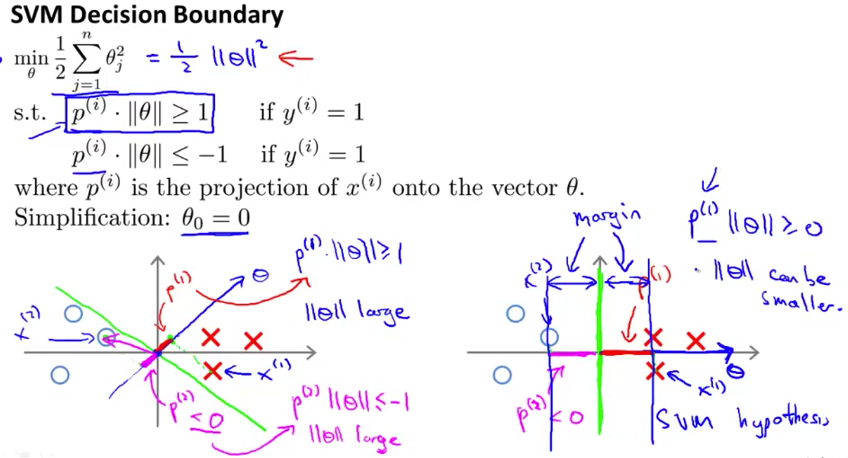
当算法得到一个「较差」的决策边界时(如上图左半), \(p^{(i)}\) 较小,要使得 \(p^{(i)}\cdot \Vert \theta \Vert >1\) ,\(\Vert\theta\Vert\) 必然较大。那么要继续优化知道得到如上图右半类似的决策边界时, \(p^{(i)}\) 较大,才达到优化目标。而 \(p^{(i)}\) 实际上就是样本到决策边界的距离,即「边界」。
核:非线性决策边界
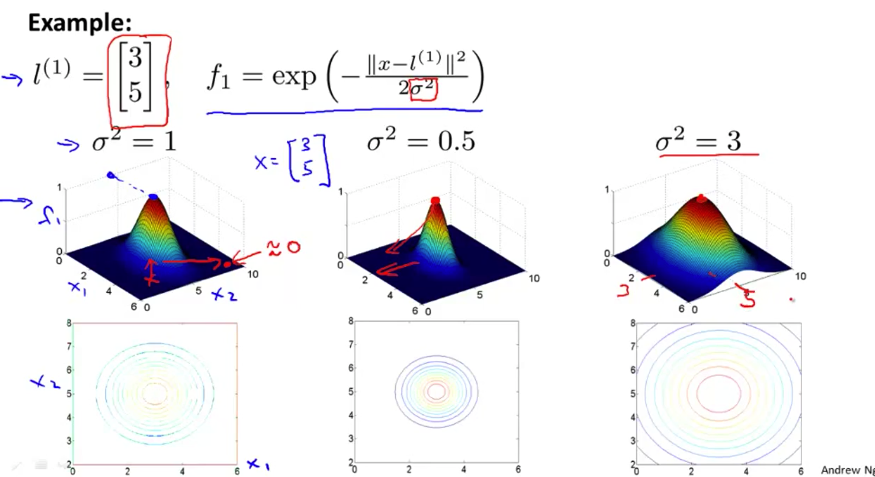
对于拥有非线性决策边界的问题,若用常规方法拟合,那么「特征」会变得非常多。高斯核(Guassian kernel)引入了「相似度」(similarity)来解决这一问题。相似度描述的是坐标系中样本 \(x\) 和「地标」(landmark) \(l^{(i)}\) 之间的关系,具体定义如下。
\[\begin{equation}\begin{aligned} f_i(x) & = \mathrm{similarity}(x, l^{(i)}) \\ & = \mathrm{exp} \left( -\frac{\Vert{x-l^{(i)}}\Vert^2}{2\sigma^2}\right)\\ &= \mathrm{exp}\left(-\frac{\sum_{j=1}^{n}(x_j-l_j^{(i)})^2}{2\sigma^2}\right) \end{aligned}\end{equation}\]其中 \(x\) 是某样本,\(\sigma\) 是超参数,\(n\) 是样本的维度。在实践中,\(l^{(i)}\) 取自所有样本。当某样本和 \(l^{(i)}\) 「几乎一致」时,我们有 \(f_i \approx 1\) ;否则 \(f_i \approx 0\) 。直观的看,高斯核最终学习出的决策边界是由「同类」样本「聚集」而成的,可以学习出非常复杂的非线性边界。
有了核函数之后,我们的支持向量机预测如下(令 \(f_0=1\))。
\[\begin{equation}y=\left\{ \begin{aligned} 1; &&& \mathrm{if} \sum_{i=0}^{m}{\theta_i f_i(x)}\geq 0\\ 0; &&& \mathrm{otherwise}. \end{aligned} \right. \end{equation}\]而训练中我们的优化目标为(其中 \(n\) 往往等于 \(m\)):
\[\mathop{\min}_{\theta}C \sum_{i=1}^{m}y^{(i)}\mathrm{cost}_0(\theta^\mathrm{T}f^{(i)})+(1-y^{(i)})\mathrm{cost}_1(\theta^\mathrm{T}f^{(i)}) + \frac{1}{2}\sum_{j=1}^{n}\theta_i^2\]如上一小节所述,超参数 \(C\) 可看做是 \(\dfrac{1}{\lambda}\) 。那么当 \(C\) 较大时,\(\theta\) 倾向于学到大值,偏置(bias)较小,方差(variance)较大。 核函数中的超参数 \(\sigma\) 的影响如下图。当 \(\sigma\) 较大时,\(f\) 的变化比较平缓,可看做核函数的表现力不够,偏置(bias)较大,方差(variance)较小。
实践
上一小节的方法有时称作「无核」,有时称作「线性核」(linear kernel);本小节称作「高斯核」;其他的核还有「多项式核」等。
在选择逻辑回归或 SVM 求解问题时,针对特征数量 \(n\) 和样本数量 \(m\) 的不同我们有以下选择:
- 当 \(n\) 较大,且相对 \(m\) 也较大(例如 10000 相对于 10-1000)时,使用逻辑回归或无核 SVM。
- 当 \(n\) 较小,且 \(m\) 与他基本处于同一量级(例如 1-1000 和 10-100000)时,使用基于高斯核的 SVM。
- 当 \(n\) 较小,而 \(m\) 较大(例如 1-1000 和 50000+)时,增加更多的特征,然后使用逻辑回归或无核 SVM 。
神经网络往往都能较好地运行,只是训练速度可能较慢。
非监督学习
到目前为止我们接触的都是监督学习,本节介绍非监督学习。
聚类:K均值
非监督学习(unsupervised learning)尝试在「未标记」的数据中寻找结构化信息,如聚类(clustering)。
K均值(K-means)是一种典型的聚类算法,它尝试将数据划分为 K 个「类」。对于从 \(m\) 个样例中寻找 \(K\) 个「类」的基本算法如下。
- 随机地初始化类 \(\mu^{(1)}, \cdots, \mu^{(K)} \in \mathbb{R}^n\) ;
- 重复下面的步骤,直到 \(\mu_k\) 不再变化:
- 针对所有的样本 \(x_i\) ,找到与其最近的类 \(\mu_k\);则样本 \(x_i\) 被分类为 \(k\),将 \(c_i\) (表示 \(x_i\) 的分类)记为 \(k\);
- 针对所有的类 \(\mu_k$,其值被更新为「被归类到该类的\)x_i$$ 的均值」。
对于上面的步骤,如果没有任何样本被归类到某一类 \(k'\) 中,那么可以删除该分类,或者重新随机地初始化 \(\mu_{k'}\) 。对上面算法的步骤 2.1 ,即优化目标的形式化定义如下:
\[J(c^{(1)}, \cdots, c^{(m)}, \mu^{(1)}, \cdots, \mu^{(K)}) = \frac{1}{m} \sum_{i=1}^{m} \Vert x^{(i)}-\mu_{c^{(i)}}\Vert^2\]随机初始化 \(\mu^{(1)}, \cdots, \mu^{(K)}\) 的典型方法是,随机地选 \(K\) 个样例,将它们作为 \(\mu_k\) 的初值。但如果运气不好,我们运行算法后得到的可能不是「全局最优」解。这意味着 K均值算法对初值是比较敏感的。一般的解决办法是多次(20-100)运行算法,选取 \(J(c^{(1)}, \cdots, c^{(m)}, \mu^{(1)}, \cdots, \mu^{(K)})\) 最小的作为最终结果。
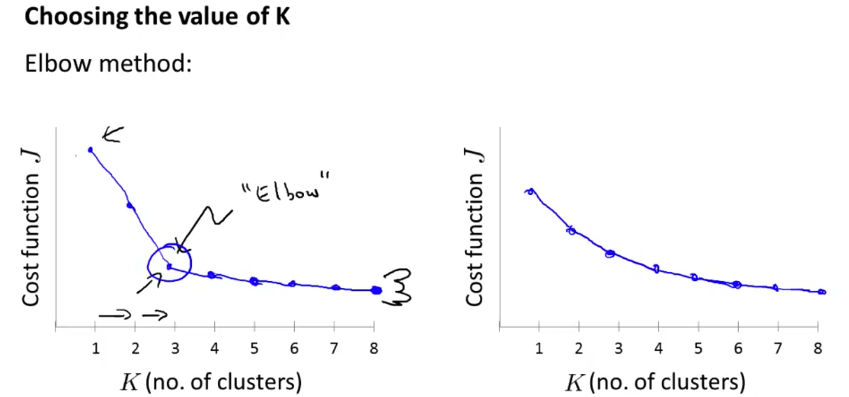
K 均值的另一个问题是如何选择 K 的大小。首先,这有点主观,因为即使面对相同的数据集,不同的人也可能给出不同的答案(结果可能和上图类似)。数学方面的解法称作「肘方法」(Elbow method)。它是尝试若干中 \(K\) 值,将目标函数 \(J\) 绘制成曲线,选取其中 \(J\) 下降速度发生显著变化的点(如下图左半)。但这种方法存在的问题是,可能根本就找不到「肘」(如下图右半)。对于选取 \(K\) 这个问题,最重要的还是要结合我们算法的最终目标。
降维:主成分分析
降维(Dimensionality Reduction)是另一种非监督学习方式,主成分分析(principal component analysis)是这类的典型算法。
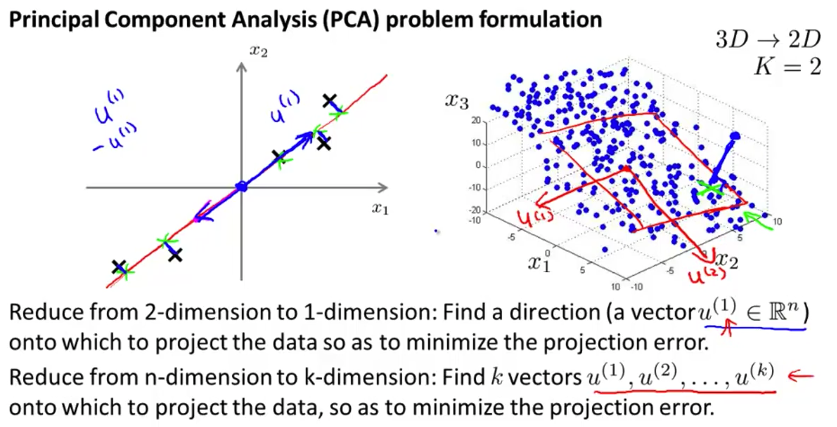
降维是将高维输入 \(x_i\in\mathbb{R}^n\) 「投影」到低维 \(z_i\in\mathbb{R}^k\) (其中 \(k\leq n\))。例如下面将二维投影到一维,三维投影到二维。
考虑这是一种非监督学习方法,即我们要从数据中学习到结构化信息,降维学到的就是「\(n\) 维输入其实可以用 \(k\) 维表示」。这种降维的表示之所以能有效地表达信息,是因为原始信息中的维度是存在「冗余」的。例如,当二维中的点基本都在一条线上,或三维中的点都在一个面上。
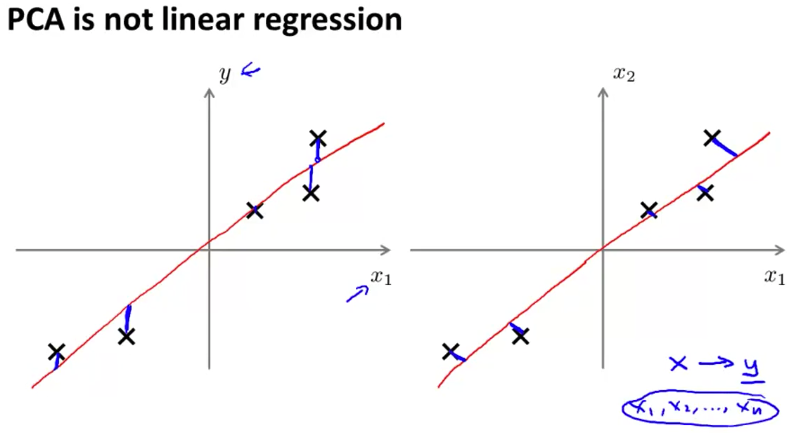
值得注意的是,PCA 和线性回归是不同的。线性回归的数据是被标记的,学习目标是对给定的 \(x\) 预测其对应的 \(y\) ;而 PCA 的目标是发现数据中的规律,找到能描述输入的低维向量。如上图,在学习过程中,线性回归的优化目标是对输入 \(x^{(i)}\) ,预测的 \(\hat y^{(i)}\) 数据输出 \(y^{(i)}\) 的距离;而 PCA 的优化目标是输入点 \(x_1^{(i)}, x_2^{(i)}\) 与到向量 \(z\) 的距离。
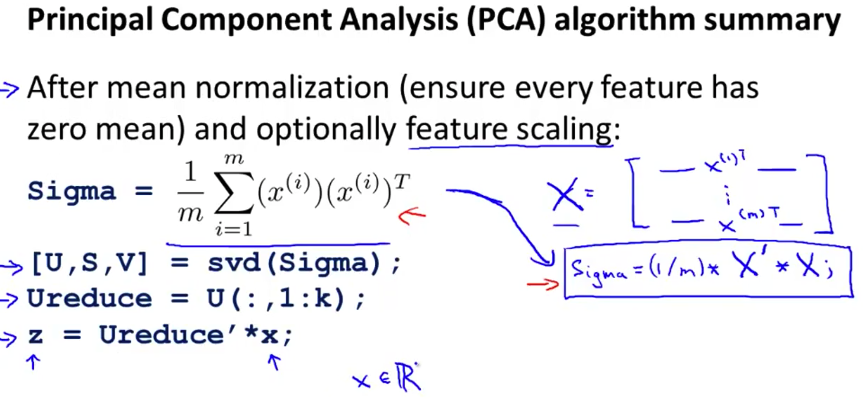
上图是 PCA 的算法,我们得到的 \(U_{\text{reduce}}^{\mathrm{T}}\) 矩阵 \(k \times n\) 的,它是 \(\begin{bmatrix} u^{(1)}, u^{(2)}, \cdots, u^{(k)} \end{bmatrix}^\mathrm{T}\) 。
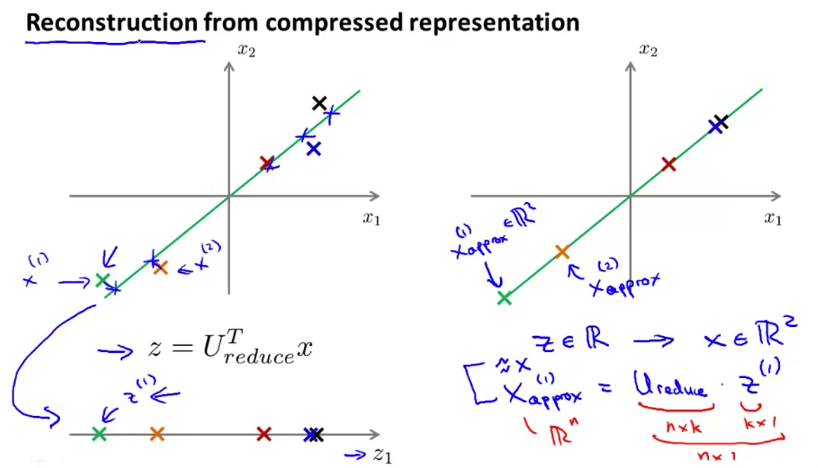
PCA 这样的算法将维度进行了压缩,同时,我们也可以将压缩后的数据 \(z^{(i)}\) 恢复成「近似」的原始数据 \(x_\text{approx}^{(i)}=U_{\text{reduce}} \cdot z^{(i)}\) 。一个二维的示例如下图。注意,恢复之后的数据实际上是 \(\mathbb{R}^n\) 在 \(\mathbb{R}^k\) 中的投影,并不完全等同于原始数据。
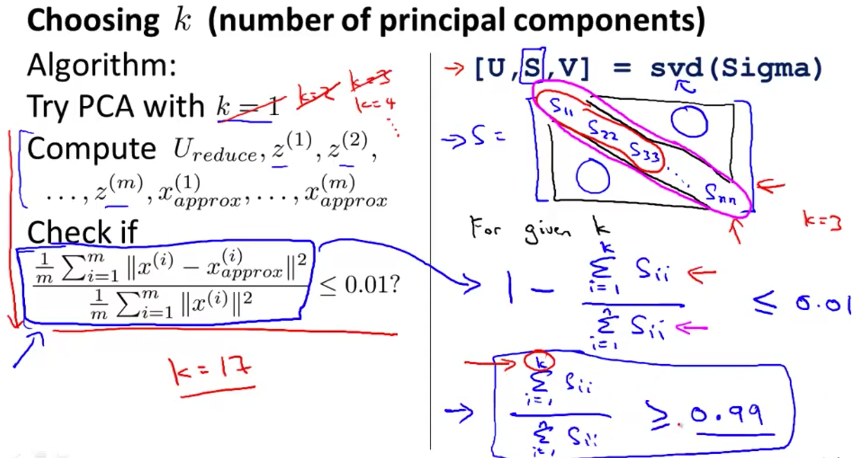
下面我们来看 PCA 中的参数 \(k\) ,即主成分的数量。其算法如下。其中的 \(0.01\) 是 \(1-\alpha\) 。$\alpha\(代表降维后保留的程度,该例子中\)\alpha=0.99$$ 。
我们使用 PCA 一般有三种原因:通过降维来压缩数据,从而减少磁盘或内存开销;通过降维来加速监督学习;将输入降维到 2 维或 3 维来可视化数据,从而寻找规律。
对于加速监督学习,因为高维度的样例会使得线性回归这样的监督学习方法运行得很慢。对于监督学习的输入 \((x^{(1)}, y^{(1)}); (x^{(2)}, y^{(2)}); \cdots; (x^{(m)}, y^{(m)});\) ,使用 PCA 将 \(x^{(i)} \in \mathbb{R}^n\) 映射为 \(z^{(i)} \in \mathbb{R}^k\) ,那么用得到的新的训练数据 \((z^{(1)}, y^{(1)}); (z^{(2)}, y^{(2)}); \cdots; (z^{(m)}, z^{(m)});\) 训练。在运行测试时,也要执行 \(z^{(i)}=U \cdot x^{(i)}\),然后再预测。
由于 PCA 能减少特征数量,有人可能会将他用来解决过拟合问题。但这是一种误用,过拟合应当用正规化方法解决。在设计机器学习系统时,如果要使用 PCA ,那么应当弄清楚用与不用的差异在哪里,是不是一定要使用。
异常检测
异常检测(Anomaly Detection)致力于检测一个输入 \(x_{\text{test}}\) 是否「异常」。这种判断基于高斯分布的密度估计(density estimation)。
密度估计的形式化定义为:
- 选定特征得到输入 \(\{x^{(1)}, \dots, x^{(m)}\}\) ;
- 拟合得到各个特征的高斯分布参数 \(\mu_1, \mu_2, \cdots, \mu_j; \sigma_1^2, \sigma_2^2, \cdots, \sigma_j^2\) :\(\displaystyle \mu_j = \frac{1}{m}\sum_{i=1}^m x_j^{(i)},\ \sigma_j^2 = \frac{1}{m}\sum_{i=1}^m(x_j^{(i)} - \mu_j)^2\) ;
- 对于给定的测试 \(x\) ,计算 \(p(x)\) ,当 \(p(x) \lt \varepsilon\) 时,我们认为发生了异常。这里的 \(\varepsilon\) 是另外的参数。 \(p(x) = \prod_{j=1}^n p(x_j; \mu_j, \sigma_j^2) = \prod_{j=1}^n \frac{1}{\sqrt{2 \pi} \sigma_j} \exp{\left(- \frac{(x_j - \mu_j)^2}{2 \sigma_j^2}\right)}\)
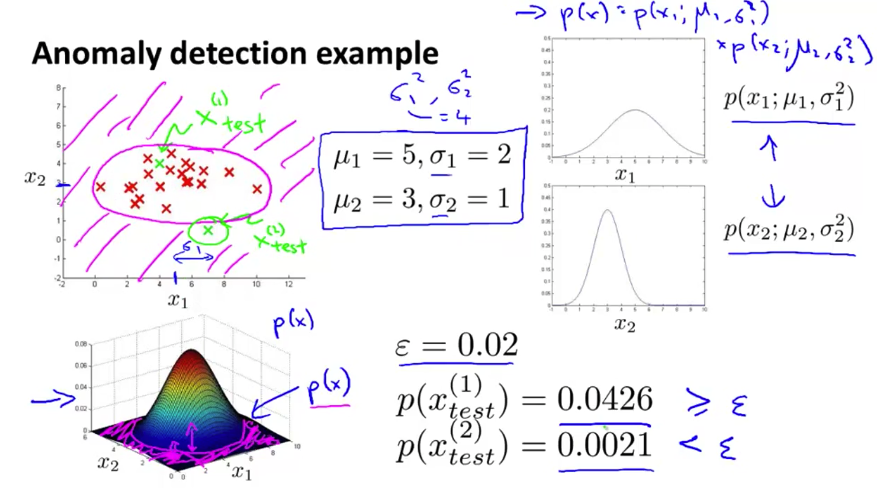
在实际应用中 ,我们得到的往往是有标记的数据。由于异常检测往往用于正常数据很多而异常数据很少(例如 10000 vs. 20)的场景中,实施异常检测的常规方法是:选取 60% 的正常数据作为训练集,验证集和测试集均为 20% 的正常数据和 50% 的异常数据。
这让异常检测看起来像是监督学习,但它和常规的监督学习方法还是有差异的。常见的异常检测包括诈骗检测、生产线检测、数据中心的检测;监督学习包括垃圾邮件分类、天气预报、癌症分类。可以看到,当我们认为这两者「相似」时,异常检测更倾向于检测低概率事件,而监督学习更倾向于分类。异常检测中除了异常数据极少,异常数据的「异常类型」各异,这使得常规监督学习方法很难有效地训练;而且新的异常和已有异常可能没什么相似之处,而监督学习希望从样例中发现规律。
前面我们提到异常检测基于高斯分布,当数据分别不够「高斯」时,我们可以应用数学技巧使得数据变成高斯分布,例如 \(\log(x), x^{\alpha}, \cdots\) 。另外,在验证我们的算法时,预测失败的数据可能能指导我们增加新的特征,或是将已有的特征组合起来。
有时我们在异常检测中使用多元高斯分布,形式化定义如下。当 \(p(x)<\varepsilon\) 时为异常。
\[\begin{equation} p(x) = \frac{1}{\sqrt{2 \pi \Sigma}} \exp{\left( -\frac{1}{2} (x-\mu)^\mathrm{T} \Sigma^{-1} (x-\mu) \right)} \\ \mu = \frac{1}{m} \sum_{i=1}^{m} x^{(i)}, \Sigma = \frac{1}{m} \sum_{i=1}^{m} (x^{(i)}-\mu) (x^{(i)}-\mu)^{\mathrm{T}} \end{equation}\]在异常检测中,我们可以将之前的模型看做是多元高斯分布的一种特例—— \(\Sigma \in \mathbb{R}^{n \times n}\) 是以 \(\sigma_1^2, \sigma_2^2, \cdots, \sigma_n^2 \in \mathbb{R}^{n}\) 为对角的矩阵。这种情况下形成的分布总是轴对称的。
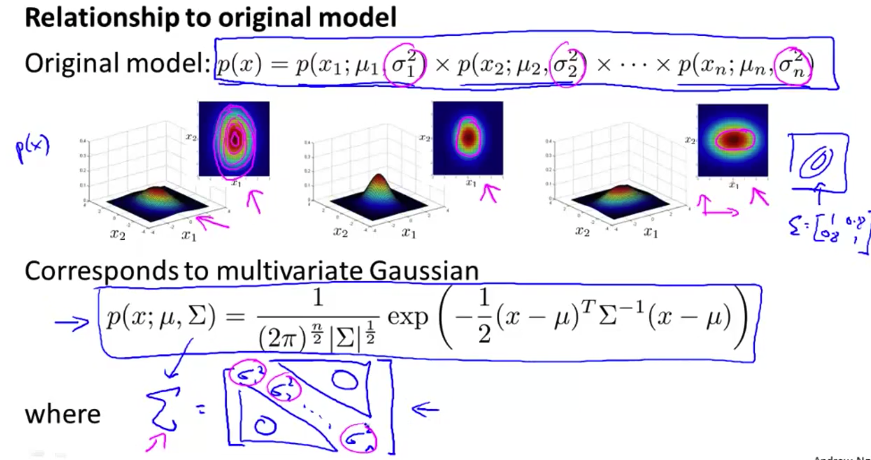
多元高斯的优势在于它能自动地捕捉特征之间的联系,而原模型需要手动设计。但由于需要计算逆矩阵 \(\Sigma^{-1}\) ,因此计算代价较高,特征太多时可能就不实用。另外,数据量必须大于特征量,否则无法计算 \(\Sigma^{-1}\) (一般在 \(m \gt 10 n\) 时才使用) 。
推荐系统(Recommender Systems)
大规模机器学习
实例:光学字符识别


